A Stream Processing Pipeline in Connected Vehicles
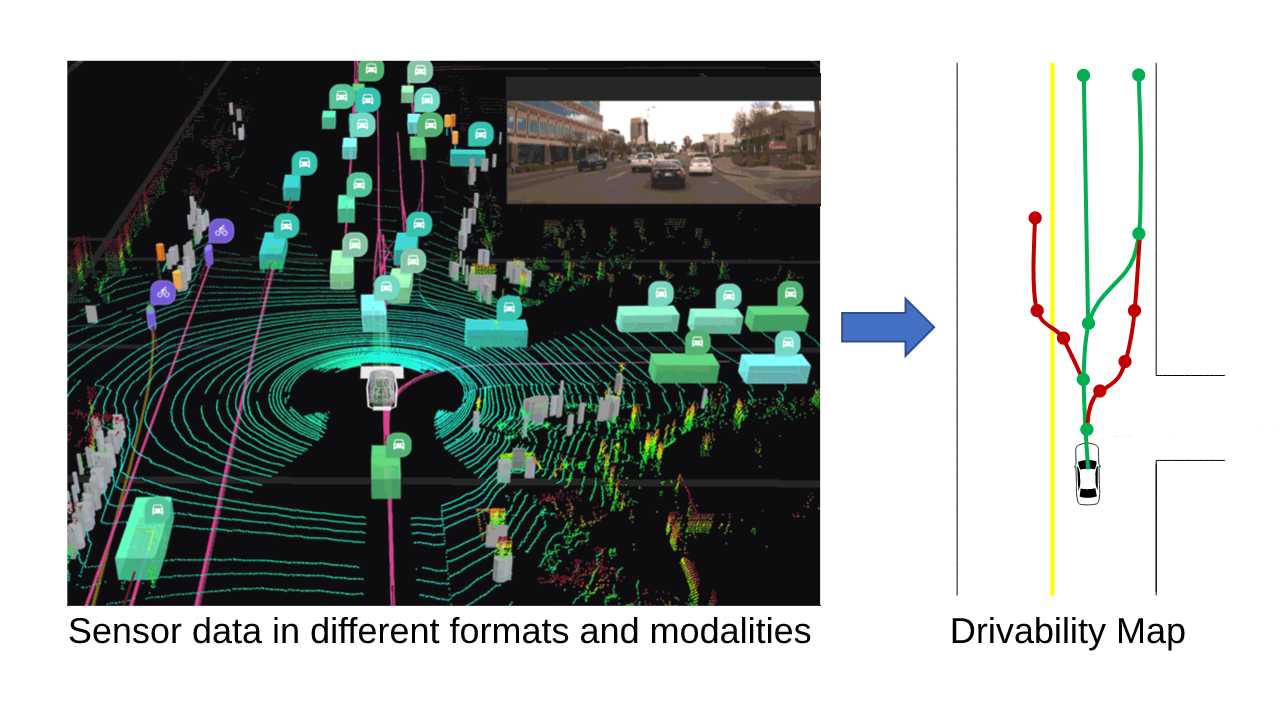
Sensor fusion operations: RGB Camera, Lidar, Radar, HD maps→object/lane detectionand object tracking.

Semantic Reasoning: What “Drivability Map” is and how it can be composed fromdetected objects and lanes.
